 Visual Paradigm Desktop |
Visual Paradigm Desktop |  Visual Paradigm Online
Visual Paradigm Online











システム性能予測は、複雑な工学プロジェクトのライフサイクルにおける重要なマイルストーンである。正確なモデルがなければ、チームは物理的プロトタイプに頼ることになり、それは費用がかかり、変更も時間がかかる。SysML(システムモデリング言語)は、システムの行動と構造を表現するための標準化されたアプローチを提供する。行動モデリング技術を活用することで、エンジニアはハードウェアが構築される前からシナリオをシミュレートできる。このガイドでは、SysMLの行動図をどのように活用して性能の結果を効果的に予測するかを検討する。
モデルベースシステムエンジニアリング(MBSE)は、文書からモデルへと焦点を移す。この文脈において、行動モデリングはどのようにシステムが時間とともにどのように動作するかを定義する。相互作用、状態変化、データフローを捉える。性能予測において、行動は機能性だけを意味するものではない。タイミング、リソース消費、スループットが含まれる。
SysMLにおける行動モデリングは、いくつかの重要な目的を果たす:
性能を予測する際の目的は、遅延、エネルギー消費、スループットなどの変数を定量することである。SysML図はこれらの計算の構造的フレームワークを提供する。この言語はツールに依存しないように設計されており、シミュレーションに使用するプラットフォームに関わらず、モデルが有効であることを保証する。
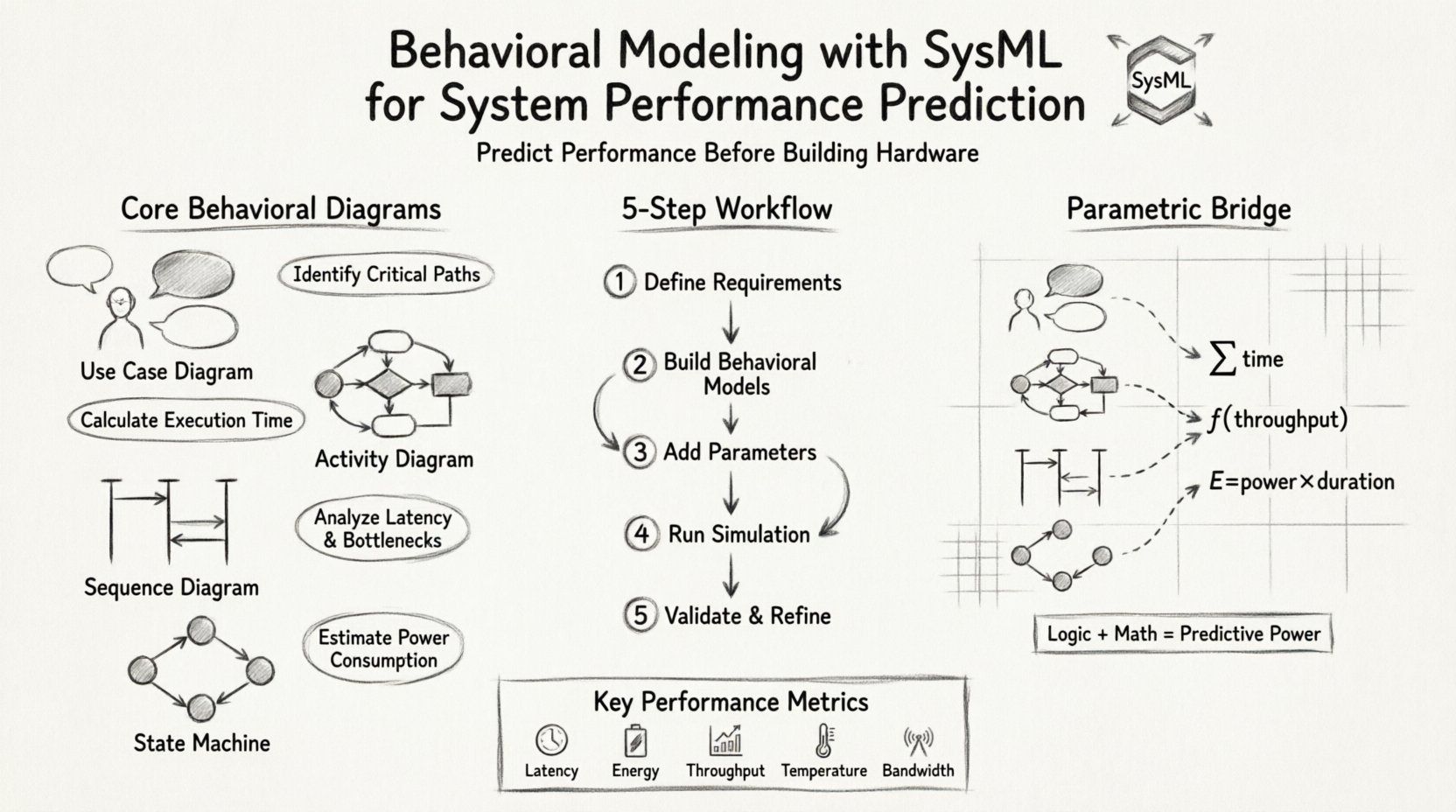
SysMLには、システムの行動を捉えるために特に設計された複数の図タイプが含まれる。各図は性能予測のワークフローにおいて独自の役割を果たす。適切な図を選択するには、分析対象の性能の特定の側面に応じて判断する必要がある。
ユースケース図はシステムの機能的範囲を定義する。アクターとそれらが関与する機能をマッピングする。主に機能要件に使用されるが、高レベルの相互作用を特定することで、性能分析の土台を整える。
性能予測において、ユースケース図は重要な経路を特定するのに役立つ。特定のアクターが高負荷の機能と頻繁にやり取りする場合、その経路は詳細なタイミング分析が必要となる。
アクティビティ図は、システム内の制御およびデータの流れを記述する。プロセスやワークフローをモデル化するための最も直接的なツールである。性能工学において、これらの図は操作の順序をマッピングする。
主な要素には以下が含まれる:
性能をシミュレートする際、アクティビティ図は合計実行時間を計算できる。個々のアクティビティに時間値を割り当てることで、プロセスの合計期間は計算可能な指標となる。これはレイテンシが重要な制約となるリアルタイムシステムにおいて不可欠である。
シーケンス図は、時間の経過とともにコンポーネント間の相互作用に注目する。タイムラインに沿ってオブジェクト間で交換されるメッセージを表示する。この図は、通信オーバーヘッドを理解するために不可欠である。
シーケンス図の性能に関する考慮事項には以下が含まれる:
縦軸(時間)を分析することで、エンジニアはコンポーネント間の通信におけるボトルネックを特定できる。これはネットワークレイテンシが全体のパフォーマンスに影響を与える分散システムにおいて特に有用である。
ステートマシン図は、システムまたはコンポーネントのライフサイクルをモデル化する。明確な状態とそれらの間で発生する遷移を定義する。ここでの性能予測は、状態の持続時間と遷移頻度に焦点を当てる。
主な側面には以下が含まれる:
性能分析において、ステートマシン図は電力消費を計算するのに役立つ。異なる状態はしばしば異なる電力プロファイルを持つ。特定の状態にいる確率をモデル化することで、エンジニアは時間経過に伴う平均エネルギー消費を推定できる。
行動図は「何 システムが行うことです。性能を予測するには、それを定量化しなければなりません。どれほどうまくそれをどれほどうまく行うかです。ここがパラメトリック図が不可欠になるポイントです。これらは行動モデルを数学的制約や方程式と結びつけます。
パラメトリック図は論理的な行動と物理的な性能の間の橋渡しです。エンジニアが代数式を使って制約を定義できるようにします。これらの制約は、シミュレーションエンジンによって未知の変数を解くために使用されます。
一般的に分析されるパラメータには以下が含まれます:
行動図内の特定の要素とパラメータを関連付けることで、モデルはシミュレーション用に準備された資産になります。たとえば、アクティビティ図内の活動をパラメトリック図内の時間パラメータに関連付けることができます。シミュレーションが実行されると、エンジンは定義された方程式に基づいて実際の継続時間を計算します。
予測モデルを作成するには構造的なアプローチが必要です。一貫したワークフローに従うことで、正確性と保守性が保証されます。以下のステップは、行動モデリングと性能予測を統合するプロセスを概説しています。
モデリングを開始する前に、性能目標を設定しなければなりません。これらはしばしば制約として表現されます。例として以下があります:
これらの要件は要件図に記録されます。後でシミュレーション結果を検証するための基準として機能します。
システムの論理的表現を作成します。まず、範囲を定義するためにユースケース図を用います。次に、高レベルのプロセスに対してアクティビティ図を開発します。詳細な相互作用にはシーケンス図を使用します。状態機械図では、すべての関連する状態が捉えられていることを確認してください。
この段階では正確性に注目してください。性能指標を追加する前に、論理が妥当である必要があります。不完全な論理モデルは、不正確な性能データを生み出します。
行動要素を性能パラメータにリンクします。パラメトリック図を用いて数学的関係を定義します。たとえば、アクティビティの実行時間をプロセッサ速度とタスクの複雑さを表す変数にリンクします。
シミュレーションエンジンを使用してモデルを実行する。エンジンは制約と行動論理を処理してデータを生成する。このデータは、ステップ1で定義された性能要件と比較される。
この段階での主な活動には以下が含まれる:
実世界のデータが利用可能な場合、シミュレーション結果と比較する。モデルが100msの遅延を予測しているが、プロトタイプでは150msの遅延が示されている場合、モデルの改善が必要である。パラメータまたは論理を物理的な現実に合わせて更新する。
適切な図を選ぶことは、効率的なモデリングにとって不可欠である。すべての図がすべての性能側面に適しているわけではない。以下の表は、性能予測の文脈における各図の種類の長所と短所を示している。
| 図の種類 | 主な焦点 | 性能指標 | 最も適している用途 |
|---|---|---|---|
| 使用事例 | 機能的範囲 | 相互作用頻度 | 高負荷の使用事例の特定 |
| アクティビティ | プロセスフロー | 合計実行時間 | サイクル時間とスループットの計算 |
| シーケンス | コンポーネント間の相互作用 | レイテンシおよびメッセージオーバーヘッド | ネットワークおよびプロセス間通信の分析 |
| 状態機械 | ライフサイクルおよび状態 | 電力および状態持続時間 | エネルギー消費量およびアイドル時間の推定 |
| パラメトリック | 数学的制約 | 定量的メトリクス | 論理を物理的性能値に関連付ける |
性能予測のための行動モデルを構築することは特定の課題を伴う。これらの課題を早期に認識することで、再作業やモデルの不正確さを防ぐことができる。
すべての詳細をモデル化しようとするとうまくいかず、シミュレーションが扱いにくくなる。高い複雑さは計算時間を増加させ、重要な洞察を隠してしまう。
緩和策: 抽象化を使用する。特定の性能に関する質問に必要な詳細レベルでモデル化する。非重要なパスを簡略化する。
シミュレーションには正確な入力データが必要である。プロセッサの速度やネットワークのレイテンシなどのパラメータが不明な場合、結果は推測に過ぎない。
緩和策: 範囲と感度分析を使用する。不確実性を考慮するために、最良ケース、最悪ケース、平均ケースのシナリオを定義する。
SysMLの行動モデルは、動的システムの静的表現であることが多く、リアルタイムの変化を捉えるのは難しい。
緩和策: 行動図を外部のシミュレーションツールと組み合わせる。SysMLは論理と構造に、高精度な物理またはネットワークシミュレーションには専用ツールを使用する。
行動モデルの持続可能性と有用性を確保するため、以下のベストプラクティスに従う。
要件はパフォーマンス予測の基盤である。明確な要件がなければ、成功の基準が存在しない。SysMLは要件図を通じてこれを支援する。
効果的な要件モデリングには以下が含まれる:
要件がパフォーマンスの上限を指定する場合、パラメトリック図内の関連するパラメータにリンクすべきである。これにより自動検証パスが構築される。シミュレーションで制約が違反された場合、モデルはその要件が達成されていないとマークする。
パフォーマンス予測はほとんど孤立して行われない。ソフトウェア、ハードウェア、物理工学と頻繁に交差する。SysMLは標準化されたインターフェースを通じて、この統合を促進する。
ソフトウェアのパフォーマンスは、基盤となるハードウェアとシステムアーキテクチャに依存する。SysMLモデルはソフトウェアをハードウェアコンポーネントに割り当てる定義ができる。これにより、特定のプロセッサ上のソフトウェア負荷のシミュレーションが可能になる。
電源供給や熱放散などのハードウェア制約は、パフォーマンスに直接影響する。パラメトリック図はシステム動作をハードウェア仕様にリンクできる。これにより、設計が物理的限界内に維持されることを保証する。
運動や流体力学を含むシステムでは、物理的制約をモデル化しなければならない。SysMLは論理処理には優れているが、複雑な物理現象のシミュレーションには、分野特化のシミュレーションツールと頻繁に統合される。行動モデルと物理エンジンとのインターフェースは、極めて重要である。
システムモデリング言語の分野は引き続き進化している。システムがより複雑化するにつれ、正確なパフォーマンス予測の需要が高まっている。
SysMLを用いた行動モデル化は、システム性能予測のための堅固なフレームワークを提供する。論理図と数学的制約を組み合わせることで、エンジニアは物理的実現の前に設計を検証できる。このプロセスには、慎重な計画、正確なデータ、およびシステムの運用文脈に対する明確な理解が求められる。
覚えておくべきポイント:
このアプローチを採用することで、リスクとコストを削減しつつシステムの信頼性を向上できる。データに基づいた意思決定が可能になり、直感に頼るのではなくなる。システムの複雑性が増す中で、モデリングによる性能予測の能力は、エンジニアリングの成功にとって不可欠なスキルとなる。
はい、SysMLモデルに必要な行動論理とパラメトリック制約が含まれていれば、直接シミュレーション可能です。ただし、シミュレーションの複雑さは使用する特定のツールやモデルの深さに依存します。
機能モデリングはシステムが何をするかを定義する。性能モデリングはその実行の質を定義する。SysMLでは、両方を同じフレームワーク内でモデリングでき、機能と能力の整合性を保証できる。
範囲と確率論的手法を使用する。パラメータに対して最小値、最大値、期待値を定義する。異なる組み合わせでシミュレーションを実行し、不確実性が最終結果に与える影響を理解する。
これらのガイドラインに従うことで、チームは効果的な行動モデルを構築でき、より良いエンジニアリング成果をもたらす。モデリングへの投資は、プロトタイピングサイクルの短縮とシステム性能に対する高い信頼性という形で、報酬をもたらす。